Human Non-Compliance with Robot Spatial Ownership Communicated via Augmented Reality: Implications for Human-Robot Teaming Safety
Christine T. Chang, Matthew B. Luebbers, Mitchell Hebert, and Bradley Hayes
Abstract
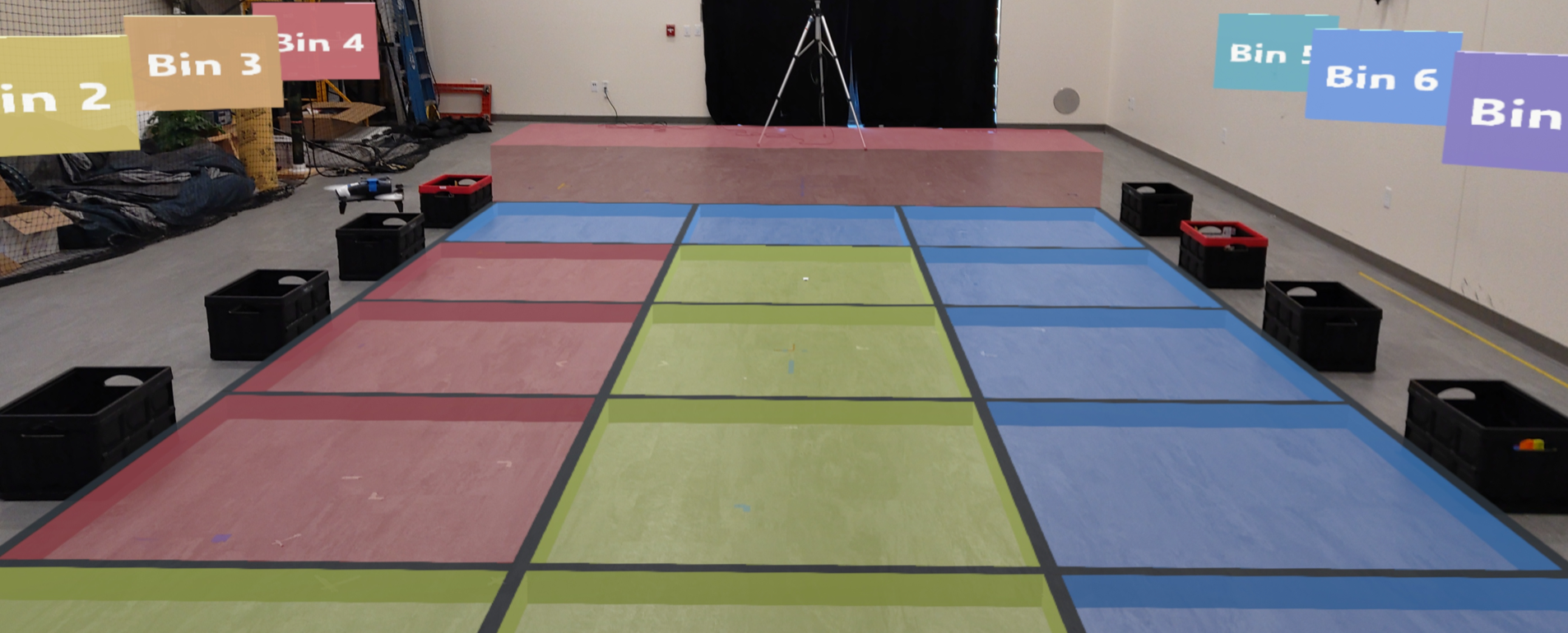
Ensuring the safety and efficiency of human workers in environments shared with autonomous robots is of paramount importance. In this work we examine the behavior and attitudes of participants performing tasks in a noisy environment collocated with an autonomous quadcopter robot. Visual communication of spatial ownership and nonverbal (deictic gesture) requests for changes in spatial ownership are facilitated using an augmented reality (AR) head-mounted device that renders a color-keyed grid on the floor. After a request, the robot can alter floor ownership to provide participants with a safe path to complete their work. Participants (n=20) in a between-subjects study took part in either a shared space condition (concurrently occupying the work floor with the robot, with obvious rationale for floor ownership) or a turn-taking condition (alternating excursions onto the grid with the robot, without apparent rationale for the floor grid colors). We find consistent evidence of potentially dangerous over-trust in the system that led to non-compliance; notably, 25% of participants intentionally walked across forbidden floor regions during the experiment. We identify design considerations and a variety of user-borne rationale for committing safety violations that designers will need to explicitly take measures to remedy in production AR safety systems.
The full paper can be accessed here, from our Publications tab, and in the ICRA 2023 Conference proceedings.