PokeRRT: Poking as a Skill and Failure Recovery Tactic for Planar Non-Prehensile Manipulation
Anuj Pasricha, Yi-Shiuan Tung, Bradley Hayes, and Alessandro Roncone
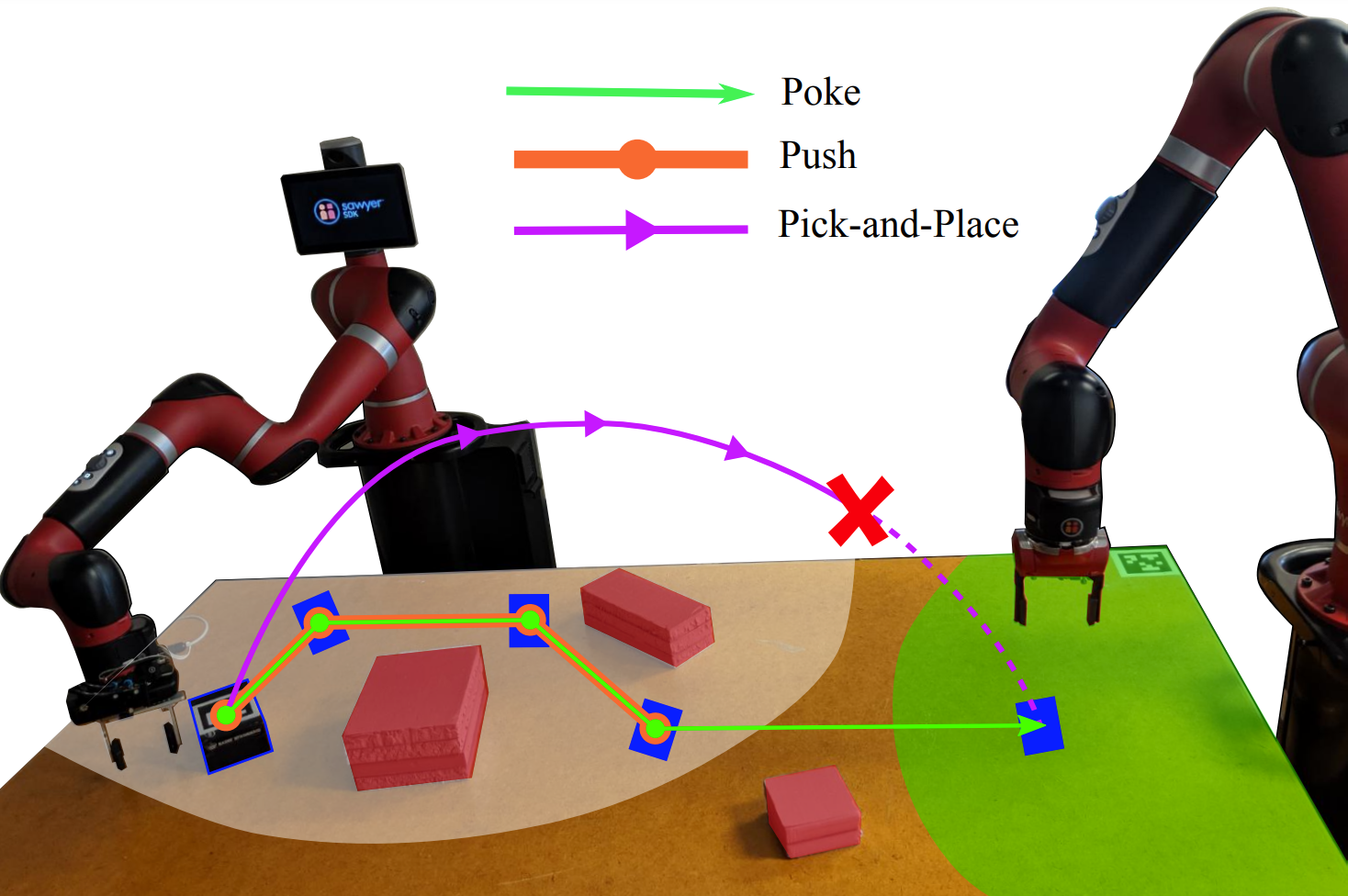
In this work, we introduce PokeRRT, a novel motion planning algorithm that demonstrates poking as an effective non-prehensile manipulation skill to enable fast manipulation of objects and to increase the size of a robot's reachable workspace. We showcase poking as a failure recovery tactic used synergistically with pick-and-place for resiliency in cases where pick-and-place initially fails or is unachievable. Our experiments demonstrate the efficiency of the proposed framework in planning object trajectories using poking manipulation in uncluttered and cluttered environments. In addition to quantitatively and qualitatively demonstrating the adaptability of PokeRRT to different scenarios in both simulation and real-world settings, our results show the advantages of poking over pushing and grasping in terms of success rate and task time.